




UNITROL1010使用方式区别ABB机器人伺服电机修理做方位操控运转报超速故障,怎么处理?
伺服Run信号一接入就发作:查看伺服电机动力电缆和编码器电缆的配线是否正确,有无破损。
输入脉冲指令后在高速运转时发作:操控器输出的脉冲频率过大,修正程序调整脉冲输出的频率;电子齿轮比设置过大;伺服增益设置太大,测验从头用手动或主动方法调整伺服增益 
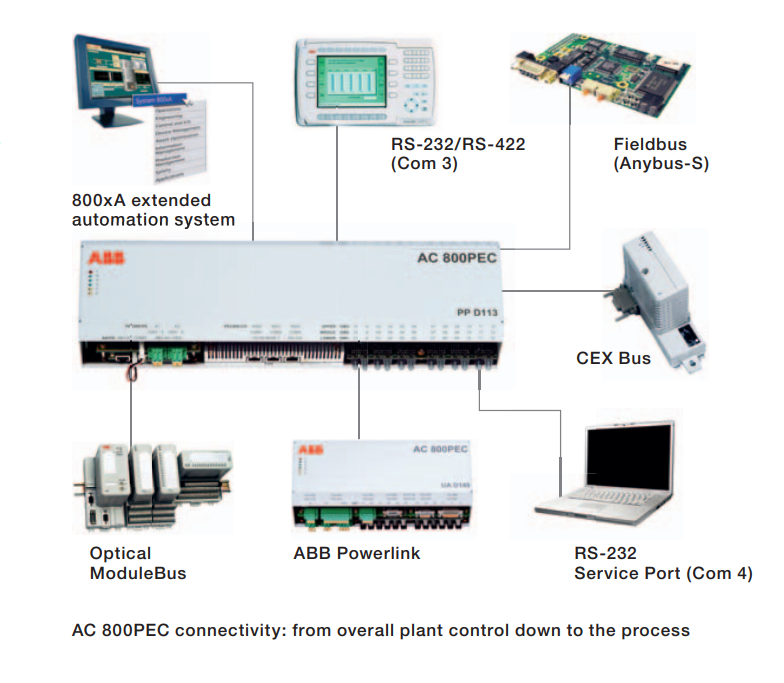
以太网连接通过插孔连接器实现,允许电路板与其他Mark VI、Mark VIe或EX2100励磁控制器以及维护和操作员站接口。ABB推出两款全新的机器人控制器OmniCore? E10和V250XT,以扩展其OmniCore?控制器系列,服务更广泛的制造应用
速度更快、柔性更高,助力客户持续提高生产效率,以响应不断变化的市场需求
新款控制器支持1000余种软硬件功能扩展,满足客户不同需求
为了满足更快、更高效的生产需求,ABB OmniCore?控制器系列推出了全新E10和V250XT控制器。两款控制器可与ABB多种型号机器人配合使用,提供业界先的运动控制功能,节省高达20%的能源,并通过内置数字化连接和1000多种可扩展功能来满足未来不断变化的需求。E10和V250XT控制器的推出将为电子装配、汽车、物流、通用工业等行业客户带来更强大的机器人控制体验。
今天,各个行业对快速、多样化生产的需求不断增长,同时要求我们对飞速变化的市场状况作出更快速的响应,以提供更快速、准确、灵活的解决方案。作为ABB OmniCore?控制器家族的新成员,E10和V250XT为制造商提供了更多的可能性,使他们能够大限度地缩短停机时间,提高生产效率,以满足日益变化的需求。
——Antti Matinlauri ABB机器人全球产品管理负责人
两款全新的控制器均支持1000余种硬件和软件功能扩展,涉及编程、离线调试和模拟、维护、视觉和安全等域。此外,通过连接云端ABB Ability?互联服务,控制器强化了预防性维护和生命周期管理功能,从而进一步提升了机器人性能。
ABB还为OmniCore?控制器设计了物联网网关开放式自动化软件。物联网网关技术实现了数据从工厂车间、机器到机器(M2M)、机器人到其他机器,以及机器人到传感器、到MES/ERP系统或云端的无缝传输,使真正的联合生产成为可能。
此外,两款控制器都支持ABB的TrueMove和QuickMove运动控制技术应用,从而能够提供行业先的速度、节拍时间、重复定位精度和路径精度。这使得ABB机器人比其他同级别机器人运行速度更快。相较上一代ABB机器人产品,采用新款控制器的机器人速度将提升25%。
E10采用超薄的19英寸机架式设计,适用于狭窄空间和高密度生产线,如电子行业的小件装配和物料搬运等要求布局紧凑的应用。E10控制器可应用于ABB SCARA机器人(如IRB 920T)和负载达11kg的多关节机器人(如IRB 1300)。
OmniCore? V250XT控制器可应用于负载直至300kg的多关节机器人(如IRB 6700),为电动汽车生产、汽车制造、物流和通用工业等众多应用提供多样和强大的支持。
OmniCore? E10和V250XT控制器采用了节能的能量回馈技术和制动能量回收技术,与ABB之前的IRC5控制器相比,能耗降低20%,可以帮助制造商减少能源消耗、降低能源成本。
新款控制器均可与ABB示教器配套使用。超大8英寸多点触控显示屏支持标准手势操作,如轻触、滑动和点击,简化了机器人编程。ABB示教器支持"热插拔"式连接方式,可在不中断操作的情况下拔掉插头或重新连接使用,从而供多台机器人共享,不仅提升了机器人部署效率还能大限度降低成本。
E10和V250XT控制器的推出为ABB OmniCore?控制器家族翻开了全新篇章,目前OmniCore?控制器系列可与14款机器人搭配使用,为机器人提供更加强大的动力和柔性。所有OmniCore?控制器都基于ABB行业先的RobotWare操作系统开发,未来将进一步扩展到ABB其他机器人型号中,更多应用将在2022年陆续推出。
FL-NET网络以Ethernet为物理层,采用总线拓扑结构,是日本采纳的一种PLC网络标准,其协议栈高层为UDP/IP+ UDP/IP+独自循环通信协议,以保证通信的实时性。

PLC系统配置了一块FL612接口模块和一块EGD模块,与各变频器进行数据交换。各变频器地址均在EGD中配置,传动与PLC及传动与传动之间数据交换都是通过EGD来完成。IS220UCSAH1A使用的是QNX操作系统。
它有一个667兆赫的飞思卡尔8349处理器。
该板由12瓦、18-36 V直流电源供电。
IS220UCSAH1A的前面板包括六个母插孔连接器、一个USB端口和各种LED指示灯。

5、ABB机器人伺服电机修理几种故障没有带负载报过载,怎么处理?
假如是伺服Run(运转)信号一接入而且没有发脉冲的情况下发作:
查看伺服电机动力电缆配线,查看是否有接触不良或电缆破损;假如是带制动器的伺服电机则必须将制动器翻开;速度回路增益是否设置过大;速度回路的积分时间常数是否设置过小。
假如伺服只是在运转过程中发作:
方位回路增益是否设置过大;定位完成幅值是否设置过小;查看伺服电机轴上没有堵转,并从头调整机械。
6、ABB机器人伺服电机修理几种故障运转时出现反常声音或颤动现象,怎么处理?
伺服配线:
运用规范动力电缆,编码器电缆,操控电缆,电缆有无破损;查看操控线附近是否存在干扰源,是否与附近的大电流动力电缆互相平行或相隔太近;查看接地端子电位是否有发作变化,实在确保接地杰出。
伺服参数:
伺服增益设置太大,主张用手动或主动方法从头调整伺服参数;承认速度反应滤波器时间常数的设置,初始值为0,可测验增大设置值;电子齿轮比设置太大,主张恢复到出厂设置;伺服体系和机械体系的共振,测验调整陷波滤波器频率以及幅值。
机械体系:
衔接电机轴和设备体系的联轴器发作偏移,安装螺钉未拧紧;滑轮或齿轮的咬合不良也会导致负载转矩变化,测验空载运转,假如空载运转时正常则查看机械体系的结合部分是否有反常;承认负载惯量,力矩以及转速是否过大,测验空载运转,假如空载运转正常,则减轻负载或替换更大容量的驱动器和电机。本特利bently3500在钢铁电力化工石化行业的应用和振动监测的测点
压缩机归属于通用设备类,较优应用于钢铁、电力、冶金、化工、石化等企业。以下是电机通过齿轮箱拖动压缩机机组使用本特利振动保护系统的配置事例,供大家参考。
压缩机组:电机,齿轮箱,压缩机
本特利bently3500典型的振动测点布置如下:
电机前后轴承箱安装有壳振传感器,用于测量电机轴承的j对振动。齿轮箱的低速端和gao速端分别安装有壳振传感器,用于测量齿轮箱的j对振动。压缩机前后X-Y方向涡流传感器系统,用于监测轴振动。另外,也使用了一套涡流传感器系统测量压缩机轴位移,以及一套涡流传感器系统测量监测键相。振动监测产品系统配置如下:
离心式压缩机–蒸汽透平拖动
对于工作在危险区域的机组,本特利传感器及监测系统都要带有多机构批准单位选项。而对于工作在安全区的机组,则不做要求。
1.测点配置要求
键相:压缩机组的每个相同转速的轴系配置一个键相位测点;采用本特利3300XL系列电涡流传感器进行测量。
轴振:每个滑动支持轴承上配置一对X/Y方向(互为垂直安装)的轴振测点,采用本特利3300XL系列电涡流传感器进行测量。
轴位移:压缩机组的每个推力轴承处配置双冗余的轴向位移测点;采用本特利3300XL系列电涡流传感器进行测量。
瓦振(可选):每个滚动支持轴承上配置两个瓦振测点(水平和垂直方向安装),采用本特利330500系列Velomitor压电式振动速度传感器进行测量。
齿轮箱壳振(如适用):每个齿轮箱的输入和输出轴的支持轴承处各配置一对X/Y方向壳振测点;采用本特利330400系列压电式振动加速度传感器进行测量。
超速保护(可选):每台压缩机组上配置三冗余的超速保护测点,采用3300XL系列电涡流传感器进行测量。2.本特利bently3500配置要求
每套关键压缩机组配备本特利3500框架;本特利bently35003500/15电源模块;
本特利bently35003500/22M瞬态数据接口模块;本特利bently35003500/25键相模块
针对上述轴振、轴位移、瓦振、及壳振测点,本特利bently35003500/42M监测器模块
(如适用),超速保护监测测点,需采用3500/53三冗余监测模块,每个监测通道(轴振、轴位移和瓦振)配置d立的两个继电器输出通道;采用本特利bently35003500/32(4通道)或3500/33(16通道)继电器模块,本特利bently35003500/92Modbus通讯网关
对于工作在危险区的机组,接入现场信号的3500监测器模块要带有内置安全栅;并且3500框架内要配置3500/04本安接地模块。
离心式压缩机–电动机拖动
对于工作在危险区域的机组,本特利传感器及监测系统都要带有多机构批准单位选项。而对于工作在安全区的机组,则不做要求。
1.本特利bently3500对机组的振动监测状态监测测点配置要求
键相:压缩机组的每个相同转速的轴系配置一个键相位测点;采用本特利3300XL系列电涡流传感器进行测量。
轴振:每个滑动支持轴承上配置一对X/Y方向(互为垂直安装)的轴振测点,采用本特利3300XL系列电涡流传感器进行测量。
轴位移:压缩机组的每个推力轴承处配置双冗余的轴向位移测点;采用本特利3300XL系列电涡流传感器进行测量。
瓦振:每个滚动支持轴承上配置两个瓦振测点(水平和垂直方向安装),采用本特利330500系列Velomitor压电式振动速度传感器进行测量。
轴承温度(如适用):每个滑动支持轴承及推力轴承均配置轴瓦温度测点;推力轴承的工作面和非工作面应同时配置温度测点。
齿轮箱壳振(如适用):每个齿轮箱的输入和输出轴的支持轴承处各配置一对X/Y方向壳振测点;采用本特利330400系列压电式振动加速度传感器进行测量。
2.本特利bently3500配置要求
每套关键压缩机组配备的本特利3500框架
每个本特利3500框架内配置冗余的3500/15电源模块
每个本特利3500框架内配置3500/22M瞬态数据接口模块;
针对上述键相测点,每套机组的本特利3500框架内配置相应的3500/25键相模块
针对上述轴振、轴位移、瓦振、及壳振测点,均须配置相应的3500/42M监测器模块
(如适用),上述轴承温度测点,需配置相应的3500/60、61温度监测模块,或3500/62过程量监测模块
每个监测通道(轴振、轴位移和瓦振)配置D立的两个继电器输出通道;采用3500/32(4通道)或3500/33(16通道)继电器模块
每个本特利3500框架内配置一个3500/92Modbus通讯网关
对于工作在危险区的机组,接入现场信号的3500监测器模块要带有内置安全栅;并且3500框架内要配置3500/04本安接地模块。
螺杆压缩机
对于工作在危险区域的机组,本特利传感器及监测系统都要带有多机构批准单位选项。而对于工作在安全区的机组,则不做要求。
1.本特利bently测点配置要求
键相:压缩机组的每个相同转速的轴系配置一个键相位测点;采用本特利3300XL系列电涡流传感器进行测量。
轴振:每个滑动支持轴承上配置一对X/Y方向(互为垂直安装)的轴振测点,采用本特利3300XL系列电涡流传感器进行测量。
轴位移:压缩机组的每个推力轴承处配置双冗余的轴向位移测点;采用本特利3300XL系列电涡流传感器进行测量。
瓦振:每个滚动支持轴承上配置两个瓦振测点(水平和垂直方向安装),采用本特利330500系列Velomitor压电式振动速度传感器进行测量。
轴承温度(如适用):每个滑动支持轴承及推力轴承均配置轴瓦温度测点;推力轴承的工作面和非工作面应同时配置温度测点。
齿轮箱壳振(如适用):每个齿轮箱的输入和输出轴的支持轴承处各配置一对X/Y方向壳振测点;采用本特利330400系列压电式振动加速度传感器进行测量。
2.3500配置要求
每套关键压缩机组配备本特利3500框架
每个本特利3500框架内配置冗余的3500/15电源模块
每个本特利3500框架内配置3500/22M瞬态数据接口模块(RJ45网络接口)
针对上述键相测点,每套机组的本特利3500框架内配置相应的3500/25键相模块
针对上述轴振、轴位移、瓦振、及壳振测点,均须配置相应的3500/42M监测器模块
(如适用),上述轴承温度测点,需配置相应的3500/60、61温度监测模块,或3500/62过程量监测模块
每个监测通道(轴振、轴位移和瓦振)配置D立的两个继电器输出通道;采用3500/32(4通道)或3500/33(16通道)继电器模块
每个本特利3500框架内配置一个3500/92Modbus通讯网关
对于工作在危险区的机组,接入现场信号的3500监测器模块要带有内置安全栅;并且3500框架内要配置3500/04本安接地模块。API618往复式压缩机
对于工作在危险区域的机组,本特利传感器及监测系统都要带有多机构批准单位选项。而对于工作在安全区的机组,则不做要求。
How to deal with the overspeed fault reported by ABB robot servo motor maintenance for azimuth operation?
Once the servo run signal is connected, it will happen: check whether the wiring of the servo motor power cable and encoder cable is correct and whether there is damage.
After the pulse command is input, it occurs at high speed: the pulse frequency output by the controller is too high, and the correction program adjusts the frequency of the pulse output; The electronic gear ratio is set too large; The servo gain setting is too large. Test to adjust the servo gain manually or actively from the beginning
5. How to deal with several failures of ABB robot servo motor that are not reported overload with load?
If the servo Run signal is connected and no pulse is sent:
Check the power cable wiring of the servo motor to see if there is poor contact or cable damage; If it is a servo motor with brake, the brake must be turned over; Whether the speed loop gain is set too large; Whether the integral time constant of the speed loop is set too small.
If the servo only occurs during operation:
Whether the gain of azimuth loop is set too large; Whether the amplitude of positioning completion is set too small; Check that there is no locked rotor on the servo motor shaft, and adjust the machine from the beginning.
6. How to deal with the abnormal sound or vibration of ABB robot servo motor when it runs in repair of several faults?
Servo wiring:
Whether the power cable, encoder cable, control cable and cable are damaged; Check whether there are interference sources near the control line and whether they are parallel to or too close to the nearby high current power cables; Check whether the potential of the grounding terminal changes suddenly to ensure excellent grounding.
Servo parameters:
If the servo gain is set too large, it is recommended to manually or actively adjust the servo parameters from the beginning; Acknowledge the setting of the time constant of the speed response filter. The initial value is 0, and you can test to increase the setting value; The electronic gear ratio is set too large, so it is recommended to restore to the factory setting; Resonance of servo system and mechanical system, test and adjust the frequency and amplitude of notch filter.
Mechanical system:
The coupling connecting the motor shaft and the equipment system deviates, and the mounting screws are not tightened; Poor engagement of pulleys or gears will also cause load torque changes. Test no-load operation. If it is normal during no-load operation, check whether the combination part of the mechanical system is abnormal; Recognize whether the load inertia, torque and speed are too large, and test the no-load operation. If the no-load operation is normal, reduce the load or replace the driver and motor with larger capacity. Application of Bently 3500 in steel, electric power, chemical and petrochemical industry and measuring points for vibration monitoring
The compressor belongs to the general equipment category, which is better used in steel, power, metallurgy, chemical, petrochemical and other enterprises. The following is a configuration example of Bentley vibration protection system used by the motor to drive the compressor unit through the gearbox for your reference.
Compressor unit: motor, gearbox, compressor
Typical vibration measuring points of Bently 3500 are arranged as follows:
The front and rear bearing boxes of the motor are equipped with shell vibration sensors to measure the j pair vibration of the motor bearings. The low speed end and gao speed end of the gearbox are respectively equipped with case vibration sensors to measure the j pair vibration of the gearbox. The front and rear X-Y direction eddy current sensor system of the compressor is used to monitor shaft vibration. In addition, a set of eddy current sensor system is also used to measure the compressor shaft displacement, and a set of eddy current sensor system is used to measure and monitor the key phase. The system configuration of the vibration monitoring product is as follows:
Centrifugal Compressor – Steam Turbine Drive
For units working in hazardous areas, Bentley sensors and monitoring systems should have the option of multi agency approval units. There is no requirement for the units working in the safe area.
1. Requirements for measuring point configuration
Keyphasor: each shafting of the compressor unit at the same speed is equipped with a Keyphasor measuring point; Bentley 3300XL series eddy current sensor is used for measurement.
Shaft vibration: each sliding support bearing is equipped with a pair of shaft vibration measuring points in X/Y direction (installed vertically to each other), which are measured by Bentley 3300XL series eddy current sensors.
Axial displacement: each thrust bearing of the compressor unit is equipped with double redundant axial displacement measuring points; Bentley 3300XL series eddy current sensor is used for measurement.
Bearing vibration (optional): each rolling support bearing is equipped with two bearing vibration measuring points (installed horizontally and vertically), which are measured by Bentley 330500 series Velomitor piezoelectric vibration velocity sensor.
Gearbox shell vibration (if applicable): a pair of X/Y direction shell vibration measuring points shall be provided at the support bearings of input and output shafts of each gearbox; Bentley 330400 series piezoelectric vibration acceleration sensor is used for measurement.
Overspeed protection (optional): each compressor unit is equipped with three redundant overspeed protection measuring points, which are measured by 3300XL series eddy current sensors. 2. Bently 3500 configuration requirements
Each key compressor unit is equipped with Bentley 3500 frame; Bently 35003500/15 power module;
Bently 35003500/22M transient data interface module; Bently 35003500/25 Keyphasor Module
Bently Bently 35003500/42M monitor module for the above measuring points of shaft vibration, shaft displacement, bearing vibration and shell vibration
(If applicable), 3500/53 triple redundant monitoring module shall be used for overspeed protection monitoring measuring points, and each monitoring channel (shaft vibration, shaft displacement and bearing vibration) shall be configured with two relay output channels; Bently Bently 3500 3500/32 (4-channel) or 3500/33 (16 channel) relay module is adopted, Bently Bently 3500 3500/92Modbus communication gateway is adopted
For units working in hazardous areas, 3500 monitor modules connected to field signals shall be equipped with built-in safety barriers; 3500/04 intrinsically safe grounding module shall be configured in the 3500 rack.
Centrifugal Compressor – Motor Driven
For units working in hazardous areas, Bentley sensors and monitoring systems should have the option of multi agency approval units. There is no requirement for the units working in the safe area.
1. Bently 3500's requirements on the configuration of measuring points for vibration monitoring of the unit
Keyphasor: each shafting of the compressor unit at the same speed is equipped with a Keyphasor measuring point; Bentley 3300XL series eddy current sensor is used for measurement.
Shaft vibration: each sliding support bearing is equipped with a pair of shaft vibration measuring points in X/Y direction (installed vertically to each other), which are measured by Bentley 3300XL series eddy current sensors.
Axial displacement: each thrust bearing of the compressor unit is equipped with double redundant axial displacement measuring points; Bentley 3300XL series eddy current sensor is used for measurement.
Bearing vibration: each rolling support bearing is equipped with two bearing vibration measuring points (installed horizontally and vertically), which are measured by Bentley 330500 series Velomitor piezoelectric vibration velocity sensor.
Bearing temperature (if applicable): each sliding support bearing and thrust bearing shall be equipped with bearing pad temperature measuring points; The working face and non working face of thrust bearing shall be equipped with temperature measuring points at the same time.
Gearbox shell vibration (if applicable): a pair of X/Y direction shell vibration measuring points shall be provided at the support bearings of input and output shafts of each gearbox; Bentley 330400 series piezoelectric vibration acceleration sensor is used for measurement.
2. Bently 3500 configuration requirements
Bently 3500 frame for each key compressor unit
Each Bently 3500 rack is configured with redundant 3500/15 power modules
3500/22M transient data interface module is configured in each Bentley 3500 rack;
For the above Keyphasor measurement points, the Bently 3500 rack of each unit is equipped with corresponding 3500/25 Keyphasor modules
The 3500/42M monitor module must be configured for the above measuring points of shaft vibration, shaft displacement, bearing vibration and shell vibration
(If applicable), the above bearing temperature measuring points need to be configured with corresponding 3500/60, 61 temperature monitoring modules, or 3500/62 process quantity monitoring modules
Each monitoring channel (shaft vibration, shaft displacement and bearing vibration) is equipped with two relay output channels of D-type; Use 3500/32 (4-channel) or 3500/33 (16 channel) relay modules
Each Bently 3500 rack is configured with a 3500/92Modbus communication gateway
For units working in hazardous areas, 3500 monitor modules connected to field signals shall be equipped with built-in safety barriers; 3500/04 intrinsically safe grounding module shall be configured in the 3500 rack.
screw compressor
For units working in hazardous areas, Bentley sensors and monitoring systems should have the option of multi agency approval units. There is no requirement for the units working in the safe area.
1. Bently measuring point configuration requirements
Keyphasor: each shafting of the compressor unit at the same speed is equipped with a Keyphasor measuring point; Bentley 3300XL series eddy current sensor is used for measurement.
Shaft vibration: each sliding support bearing is equipped with a pair of shaft vibration measuring points in X/Y direction (installed vertically to each other), which are measured by Bentley 3300XL series eddy current sensors.
Axial displacement: each thrust bearing of the compressor unit is equipped with double redundant axial displacement measuring points; Bentley 3300XL series eddy current sensor is used for measurement.
Bearing vibration: each rolling support bearing is equipped with two bearing vibration measuring points (installed horizontally and vertically), which are measured by Bentley 330500 series Velomitor piezoelectric vibration velocity sensor.
Bearing temperature (if applicable): each sliding support bearing and thrust bearing shall be equipped with bearing pad temperature measuring points; The working face and non working face of thrust bearing shall be equipped with temperature measuring points at the same time.
Gearbox shell vibration (if applicable): a pair of X/Y direction shell vibration measuring points shall be provided at the support bearings of input and output shafts of each gearbox; Bentley 330400 series piezoelectric vibration acceleration sensor is used for measurement.
2.3500 Configuration requirements
Each key compressor unit is equipped with Bentley 3500 frame
Each Bently 3500 rack is configured with redundant 3500/15 power modules
3500/22M Transient Data Interface Module (RJ45 Network Interface) is configured in each Bentley 3500 rack
For the above Keyphasor measurement points, the Bently 3500 rack of each unit is equipped with corresponding 3500/25 Keyphasor modules
The 3500/42M monitor module must be configured for the above measuring points of shaft vibration, shaft displacement, bearing vibration and shell vibration
(If applicable), the above bearing temperature measuring points need to be configured with corresponding 3500/60, 61 temperature monitoring modules, or 3500/62 process quantity monitoring modules
Each monitoring channel (shaft vibration, shaft displacement and bearing vibration) is equipped with two relay output channels of D-type; Use 3500/32 (4-channel) or 3500/33 (16 channel) relay modules
Each Bently 3500 rack is configured with a 3500/92Modbus communication gateway
For units working in hazardous areas, 3500 monitor modules connected to field signals shall be equipped with built-in safety barriers; 3500/04 intrinsically safe grounding module shall be configured in the 3500 rack. API618 reciprocating compressor
For units working in hazardous areas, Bentley sensors and monitoring systems should have the option of multi agency approval units. There is no requirement for the units working in the safe area.

 微信二维码
微信二维码